在多相机环境中,有如下两个约束条件成立:
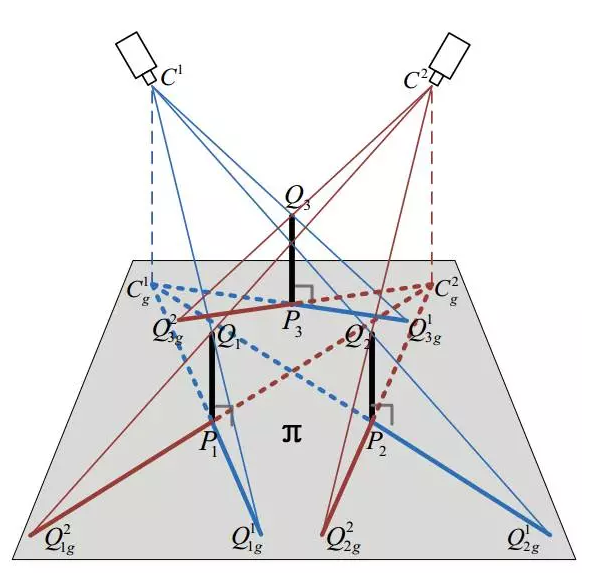
1.不同相机对于垂直于地面π的同一条直线的单应性映射(homography mappings)是共点的(concurrent),交点是该直线的垂直投影(perpendicular projection),如下图;
2.同一个相机对于垂直于地面π的不同直线的单应性映射是共点的,交点是该相机光心(optical center)的垂直投影,如下图。
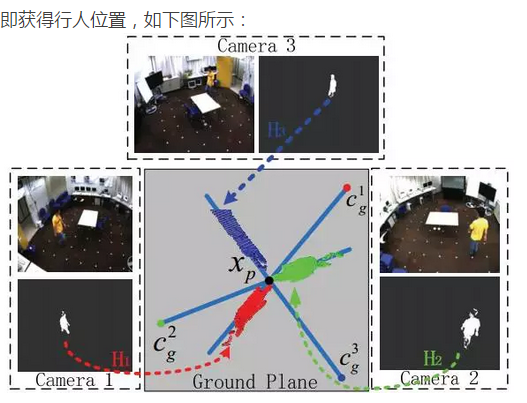
令M是相机数量,Ni(i=1,2,...,M)是前景像素的数量,所有映射到地面(ground plane)的前景像素:

X是行人的位置,定位就是最大化后验概率:

其中,F是观测值。根据贝叶斯公式:

其中,对当前行人位置的先验知识是均匀分布的,所以: